Le
GPS
Le GPS permet la localisation à partir
d'une constellation de satellites défilants américains .
De plus en plus nombreuses sont les personnes qui
ressentent la nécessité, dans leur vie professionnelle ou dans leurs loisirs,
de connaître leur position géographique en temps réel. La précision exigée quant
à la détermination de cet emplacement varie  considérablement
en fonction de l'objectif recherché, pouvant passer de quelques dizaines de
mètres à quelques millimètres. Ainsi, le transporteur routier ou aérien, le
navigateur, le randonneur, le plaisancier, le géomètre ou le forestier n'auront
pas les mêmes attentes car leur tolérance quant à l'exactitude de l'information
fournie peut différer de manière importante. De cette précision peut
même en résulter la survie ! Pour répondre aux divers besoins émanants
de la multitude des utilisateurs, il existe depuis quelques années un outil
capable de leur fournir les indications nécessaires en les situant dans l'espace
et dans le temps. Il s'agit de la méthode GPS (Global Positioning System), déjà
accessible à un large public par le biais de récepteurs relativement bon marchés.
considérablement
en fonction de l'objectif recherché, pouvant passer de quelques dizaines de
mètres à quelques millimètres. Ainsi, le transporteur routier ou aérien, le
navigateur, le randonneur, le plaisancier, le géomètre ou le forestier n'auront
pas les mêmes attentes car leur tolérance quant à l'exactitude de l'information
fournie peut différer de manière importante. De cette précision peut
même en résulter la survie ! Pour répondre aux divers besoins émanants
de la multitude des utilisateurs, il existe depuis quelques années un outil
capable de leur fournir les indications nécessaires en les situant dans l'espace
et dans le temps. Il s'agit de la méthode GPS (Global Positioning System), déjà
accessible à un large public par le biais de récepteurs relativement bon marchés.
Le GPS ou « Global Positioning System » est un système
américain basé sur une constellation de satellites défilants en orbite polaire
(ils passent par le pôle), embarquant des horloges très précises permettant
la diffusion d'éphémérides aussi précis. Après traitement et reconstitution
du temps de propagation des satellites au sol (le temps que va mettre l’onde
radio partant du satellite à arriver au récepteur au sol), cela permet de se
positionner sur la terre, et aussi d'apprécier déplacements, vitesses, accélérations
c'est‑à‑dire en général de faire de la navigation par des calculs
de trajectographie. La partie spatiale est constituée d'un ensemble de 24 satellites
répartis sur 6 plans orbitaux. Ces satellites évoluent à une altitude d'environ
20000 km et mettent environ 12 heures pour effectuer une 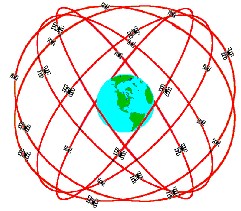 rotation.
Chaque satellite possède un oscillateur qui fournit une fréquence fondamentale
de 10,23 MHz calibrée sur des horloges atomiques. L'émetteur génère deux ondes
(L1 et L2) de fréquence respective 1575,42 MHz et 1227,60 MHz. Il transmet régulièrement
des signaux horaires, la description de l'orbite suivie (éphéméride) et diverses
autres informations.
rotation.
Chaque satellite possède un oscillateur qui fournit une fréquence fondamentale
de 10,23 MHz calibrée sur des horloges atomiques. L'émetteur génère deux ondes
(L1 et L2) de fréquence respective 1575,42 MHz et 1227,60 MHz. Il transmet régulièrement
des signaux horaires, la description de l'orbite suivie (éphéméride) et diverses
autres informations.
Le GPS est un système
rigoureux, mais compliqué comme on va le voir, que le traitement des signaux
est souvent un savoir faire de l'entreprise qui les traite dans les divers récepteurs
du commerce, et que bien sûr chacun cherche à garder son avance technologique...
Pourtant depuis quelques années le nombre d'utilisateurs du système s'est accru
de façon importante par le fait que le coût des récepteurs s'est démocratisé
et en parallèle, de la documentation et des centaines d'articles sur le sujet
sont apparus dans différentes publications techniques surtout US. Actuellement
pour moins de 2000f on arrive à trouver un récepteur GPS !
Paradoxalement l'extraction
de bases de temps précises (même à titre de matériel de mesure professionnel)
semblait jusqu'ici peu exploitée, peut‑être à cause de l’existence même
du GPS qui était il y a encore quelques années réputé pouvoir disparaître sans
avertissement ! Mais il semble que cela soit en pleine évolution...
J'aborderai donc les
principes et les performances brutes et améliorées que l’on peut en attendre
aussi bien en position selon trois axes, qu'en déplacement (appelé Différentiel
GPS ou DGPS), de l’horloge que l'on peut en extraire, des bases de fonctionnement
des récepteurs mais sans m'attacher a un type précis)

L’historique du GPS
Le début des systèmes
de navigation remonte loin dans le temps et ceux par satellites doivent approximativement
commencer aux USA par Transit qui était opérationnel en 1964. Puis sont apparus
les programmes appelés Timation et un autre développé par l'US Air Force appelé
System 621 B qui fut pour la première fois basé sur des horloges de grande précision
et un code d’émission pseudo‑aléatoire. Après expérimentation et de nombreux
essais, ce système a servi de base au Navstar GPS développé par le Joint Program
Office (JPO) vers 1969 et qui est devenu aujourd'hui le système que l'on appelle
simplement GPS. Depuis, le JPO conserve la direction du système, mais délègue
la gestion des stations sol à l’OCS (Opération control segment) dont la station
principale se trouve à Colorado Spring (Master control station) et les stations
secondaires à Hawaii, Ascension, Diégo Garcia, et Kwajalein. Inutile de vous
dire que les coûts de ces stations, l'entretien du système y compris le renouvellement
des constellations de satellites est énorme et se compte en milliards de dollars,
merci donc à ceux qui nous font bénéficier de ce service, même s'il est restreint,
et peut être ouvert dans quelques années vers 2007.Le fonctionnement de ces
stations est intéressant, mais sera juste évoqué lors du fonctionnement système.
L’historique du système
concurrent russe GLONASS
À partir de 1970 la Russie s'est intéressée aux
mêmes principes de systèmes de navigation que le GPS sous l’égide du ministère
russe de la Défense, intérêt qui a été finalisé en 1988 puis mis en application
vers 1990/1991 avec un premier contingent de satellites (10/12) puis une constellation
complète de 24 satellites en 1994/1995. Le fonctionnement des stations au sol
et leur administration est plus étatique en Russie qu'aux USA, mais techniquement
les systèmes sont voisins.
Pour information, il
faut savoir que les système GPS et Glonass sont sur des fréquences différentes
en bande L, que les deux systèmes ne sont pas compatibles bien que présentant
des analogies troublantes telles les deux possibilités de précision comme on
le verra plus loin pour le GPS. Enfin Glonass à une précision du même ordre
de grandeur que le GPS, et la comparaison fine des deux systèmes sort du domaine
de cet article.
lnmarsat
C'est un système particulier,
car destiné aux communications téléphonique entre navires et la terre, et réalisé
à partir de satellites géostationnaires, mais utilisant aussi les systèmes
précédents c'est‑à‑dire GPS ou GLONASS pour la localisation. Un
mot cependant sur son fonctionnement : ce système complète le GPS et GLONASS
en donnant des informations telles que état, performances, perturbations de
propagation donc de l’horloge par satellite et par zone d'utilisation. Résultat
global obtenu: une amélioration des performances des systèmes de base.
Le système Inmarsat sert
aussi à d'autres transmissions, sous les appellations A, B, C, M et il n'est
pas impossible que dans un avenir proche il soit disponible pour d'autres utilisateurs.
Autres systèmes et perspectives futures
Il existe d'autres systèmes
par satellite de positionnement et aussi des systèmes de positionnement sans
satellite à courte distance et d'autres à grande distance comme Tacan, Omega
et Loran C. Pour ces derniers la littérature dit qu'ils seront dans un avenir
de dix à quinze ans appelés à être remplacés par le GPS ou GLONASS, mais on
entre là dans des domaines où la politique et la technique sont partie prenante
!
Pour le futur, l'ESA
(Agence spatiale européenne) à mis à son calendrier depuis 1998 le développement
d'un système de navigation globale GNSS, d'abords le GNSS‑1 qui utilisera
le GPS et GLONASS et un système complémentaire européen appelé EGNOS puis actuellement
Galiléo et enfin vers 2001 GNSS‑2 à partir de satellites géostationnaires,
un peu comme Immarsat.
Enfin pour les maniaques
comme moi de la nanoseconde, il est prévu dans la future station spatiale l’embarquement
du programme ACES soit Atomic Clock Ensemble in Space qui doit étudier l'horloge
à atomes froids Pharo et l’horloge suisse SHM soit Space hydrogen maser atteignant
la limite de la définition de la seconde... Espérons que nous pourrons profiter
de leurs références sur terre, bien que les moyens de dissémination ne soient
pas encore bien définis pour l’instant à ma connaissance.
Les principes du GPS
Le GPS comme beaucoup
de systèmes fonctionne par mesure du temps d'arrivée d'un signal radioélectrique
émis de façon synchrone par plusieurs sources.Le principe consiste à mesurer
le temps de propagation d'une onde dans l'espace entre un satellite et un 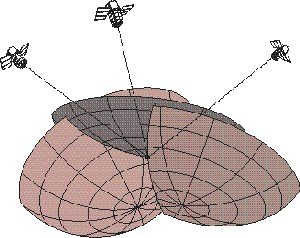 récepteur.
La détermination d'un lieu géométrique est basée sur l'intersection de trois
sphères dans l'espace. Chaque sphère est définie par son centre correspondant
à la position d'un satellite, et par son rayon qui est la distance entre le
centre et le récepteur GPS de l'utilisateur. Ainsi la mesure correspond à une
distance entre un satellite et un récepteur. Les éphémérides du satellite transmises
par le message permettent de calculer la position du satellite dans un repère
terrestre à l'instant de l'observation. Par analogie acoustique, on peut par
exemple se référer à une piste d'athlétisme où le starter tire un coup de pistolet.
Si l’on admet une vitesse du son de 345 mètres par seconde, on voit que si l’on
chronomètre un temps de
récepteur.
La détermination d'un lieu géométrique est basée sur l'intersection de trois
sphères dans l'espace. Chaque sphère est définie par son centre correspondant
à la position d'un satellite, et par son rayon qui est la distance entre le
centre et le récepteur GPS de l'utilisateur. Ainsi la mesure correspond à une
distance entre un satellite et un récepteur. Les éphémérides du satellite transmises
par le message permettent de calculer la position du satellite dans un repère
terrestre à l'instant de l'observation. Par analogie acoustique, on peut par
exemple se référer à une piste d'athlétisme où le starter tire un coup de pistolet.
Si l’on admet une vitesse du son de 345 mètres par seconde, on voit que si l’on
chronomètre un temps de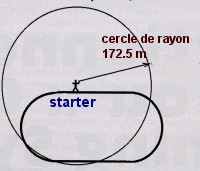 0,5 seconde entre le moment ou l’on voit la flamme du pistolet censé représenter
l’instant zéro et l'instant ou l’on entend le son, on se trouve sur un cercle
de 172,5 m de rayon centré sur le starter. Si deux starters en des lieux différents
tirent au même moment et que l'on entend le son 0,5 seconde après pour le premier
et 0,1 seconde pour le second on se trouve donc à l'intersection de deux cercles
de 172,5 m de rayon du premier et 34,5m de rayon pour le second. Il existe cependant
deux solutions et ambiguité. Maintenant si au lieu de seplacer sur un plan comme
une piste d'athlétisme, on se place dans un volume c'est‑à‑dire
dans un espace à trois dimensions, les lieux de positionnement deviennent des
sphères et leurs lieux d’intersection deux cercles.
0,5 seconde entre le moment ou l’on voit la flamme du pistolet censé représenter
l’instant zéro et l'instant ou l’on entend le son, on se trouve sur un cercle
de 172,5 m de rayon centré sur le starter. Si deux starters en des lieux différents
tirent au même moment et que l'on entend le son 0,5 seconde après pour le premier
et 0,1 seconde pour le second on se trouve donc à l'intersection de deux cercles
de 172,5 m de rayon du premier et 34,5m de rayon pour le second. Il existe cependant
deux solutions et ambiguité. Maintenant si au lieu de seplacer sur un plan comme
une piste d'athlétisme, on se place dans un volume c'est‑à‑dire
dans un espace à trois dimensions, les lieux de positionnement deviennent des
sphères et leurs lieux d’intersection deux cercles.
La levée de l'ambiguïté
pouvait se faire dés les premiers essais par l’approximation de la zone ou
l’on se trouve (par ex au niveau d’un continent). Actuellement vu l’état des
constellations en service, avec trois satellites qui donnent une seule localisation,
il n’y a plus d’ambiguïté.
Le GPS fonctionne ainsi,
mais au lieu de sons on mesure un temps de propagation de l’onde radio à partir
de satellites défilants en orbite moyenne (26600 km environ du centre de la
terre), chacun étant reconnu par son adresse et ses éphémérides qui définissent
sa position à un instant donné. Nous verrons que les récepteurs utilisent actuellement
une douzaine de satellites pour faire de la localisation pour des raisons de
performances.
Les satellites et
leurs émissions.
Les satellites
Les satellites actuels de la constellation GPS sont
issus d%ne longue lignée, respectivement des Block 1 pour évaluation au nombre
de neuf, puis Block 2 vers 1989, puis Block 2A puis Block3R de 1997 à 2004 et
seront enfin après 2004 des Block2E
Pourquoi cette longue énumération ? Parce que chaque
famille a représenté une étape de performance et d'amélioration de durée de
vie qui est actuellement de 7,5 années mais extensible par les capacités d'emport
(en général les ergols nécessaires aux corrections d'orbite) de 10 ans.
Deux informations pour la petite histoire : le codage
qui n'existait pas à l'origine a été ajouté dés que les performances furent
jugées « stratégiques » vers mars 1990, et il existe à bord depuis presque la
même époque un système appelé NUDET (Nuclear Detonation) et détecteurs associés.
La constellation actuelle est de 24 satellites,
calés à 55 degrés sur l’équateur et répartis en quatre orbites placées de façon
égale sur ce même équateur. Chaque orbite possède donc quatre satellites, mais
ceux ci ne sont pas distants d'un pas égal. Pour définir sa position, chaque
satellite diffuse ses paramètres képlériens. Notons que ces paramètres képlériens
sont assortis de termes de corrections supplémentaires que l’on ne trouvent
pas dans les données habituelles NASA ou TWO LINES bien connues, ceci à cause
de la précision recherchée et du fait que les formules de Képler ne s'appliquent
correctement que lorsqu'il y a seulement deux corps en mouvement. Ces satellites
décrivent une ellipse (avec le cercle à la limite) dont la terre est un des
foyers, mais dans le cas du GPS, où il faut de la précision, il a fallu tenir
compte en plus que la terre n'est pas une sphère parfaite, mais aplatie aux
pôles ce qui donne dans le système choisi WGS‑84 un rayon terrestre de
6378,137 km à l’équateur et 6356,7523142 km aux pôles. De plus il a fallu définir
le calage de l’équateur sur l’écliptique et on se réfère dans ce cas aux éphémérides
2000 bien connus de ceux qui font de l’astronomie. La correction de la précession
des orbites et l’effet Doppler dû à la rotation de la terre dont je vais parler
dans quelques lignes nécessitent de définir la vitesse de rotation de la terre.
Ces satellites sont surveillés
et corrigés en permanence par les stations terrestres et en particulier lors
du passage au‑dessus de la station centrale, les horloges atomiques de
bord (souvent une césium et deux rubidium) sont recalées par rapport au standards
du NBS (National Bureau of Standards qui gère tous les étalons électriques US).Les
orbites sont réajustées de façon précise (tuyères de recalage) pour pouvoir
garder les positions relatives de la constellation, son calage par rapport à
la terre, et les mêmes orbites, gage de précision du positionnement. Les éphémérides
au nombre de 16 sont recalés puis enregistrés à bord et évoluent ensuite en
fonction du temps et des perturbations externes évaluées (et non recalculés
ce qui demanderait trop de puissance informatique embarquée pour l’instant).
Enfin ils sont émis vers le sol ainsi que d'autres donnés utiles pour le positionnement
ou le fonctionnement précis du système. On voit que les stations sol du GPS
sont donc très actives car la constellation complète doit être entretenue en
permanence !
Les émissions provenant des satellites
Les fréquences d'émission
sont en bande L; L1 sur 1575,42 MHz (soit 154 fois l'horloge de base de 10,23
mégahertz) et L2 sur 1227,6 MHz (soit 120 fois l’horloge). Dans la réalité ces
fréquences sont légèrement décalées pour tenir compte de l'effet Doppler dû
à la rotation de la terre, où le récepteur n'est pas à la même place lorsque
le satellite émet ses paramètres et lorsque le récepteur les reçoit. Ceci s'appelle
l'effet « Sagnac ». L’horloge de base est ainsi décalée de 10,23 à 10,22999999245
MHz, pour obtenir la précision au sol exacte.
Les émissions sur les
fréquences L1 et L2 qui ont des buts différents, sont transmises en modulation
BPSK ou « Binary phase shift key », donc en modulation de phase, ce qui donne
au final un message NRZ qui contient l'horloge, mais ne la transmet pas de façon
explicite. L’émission se fait selon un code pseudo‑aléatoire, c'est‑à‑dire
avec un code qui revient périodiquement à la même structure de bits un et zéro.
Ce codage consiste à reboucler des registres par l’intermédiaire de « ou exclusifs
» donnant ce qui s'appelle « registre à décalage à rebouclage linéaire », ce
qui fait que les messages cités plus loin sont constitués à partir de polynômes
de la forme x + x puissance a + x puissance b + x puissance c + x puissance
d, etc. De plus ces polynômes ont une valeur de départ de codage spécifique
pour chaque séquence, toute cette organisation étant réalisée pour avoir le
brouillage minimum entre les 24 satellites qui émettent tous sur la même fréquence.
Cette séquence est gérée par un code optimisé de gestion appelé code « Gold
», du nom de la personne qui à décrit ce code et qu'il ne faut pas traduire
abusivement comme déjà vu par code en « OR …! Vous pouvez essayez d’écouter
ces fréquences, vous n'entendrez rien car comme il s'agit de spectre étalé,
il n'y a sur la fréquence considérée qu'une faible énergie, donc pratiquement
que du bruit (mais contrairement à ce qui se dit parfois, ce n'est pas du bruit,
mais des informations cohérentes). Pour extraire les signaux, il faut arriver
à être synchrone de l’émission. La valeur de l’information contenue dans un
digit ou « bit » en système binaire et dans ce système de transmission en pseudo
aléatoire n'étant pas la même, vous trouverez le terme de « chips » pour cette
information dans les informations sur le GPS, donc des cadences en « chips par
seconde » et non en « bits par secondes ».
On trouve trois types de messages cadencés
Un message C/A ou «
coarse acquisition » aussi appelé « clair acquisition », c'est le message que
tous les possesseurs de récepteurs peuvent recevoir, basé sur une horloge à
1000 hertz.
Un message P qui change
chaque semaine à minuit la nuit du samedi au dimanche, ce message P est codé
et devient dans le vocable GPS P(Y).
Un message de données
(datas) à 50 hertz. La porteuse L1 est modulée par C/A ou (exclusif) les données
et par P(Y) ou (exclusif) les données.
La porteuse L2 est modulée
par P(Y) ou (exclusif) les données ou (exclusif) par C/A ou (exclusif) les
données.
Les codes P(Y) et C/A
sont destinés au calage des horloges au sol et à la mesure du temps d'arrivée
des signaux, donc de la localisation ; les données sont les « almanachs » qui
sont relatifs à chaque satellite, numérotation, conditions de fonctionnement,
conditions de propagation, etc., et les « éphémérides » tels que déjà cités.
Le codage se fait de
deux façons afin de dégrader les performances : d’une part les éphémérides sont
légèrement dégradés, d'autre part l'horloge présente du « jitter » c'est‑à‑dire
une modulation résiduelle en fréquence. 1’ensemble de ces mesures fait que la
précision disponible n'est pas la précision maximale que l’on peut attendre
du système au moins pour les utilisateurs non habilités, ceci jusqu'en 2007
comme déjà dit.
Les porteuses L1 et L2
sont modulées avec calage en phase des trois messages les uns par rapport aux
autres de façon logique pour constituer la modulation NRZ. L’organisation complète
de ces messages demanderait beaucoup de place. Elle est décrite avec leur génération
pour ceux qui voudraient aller plus loin dans différents ouvrages.
Le bilan de liaison des
satellites aux récepteurs est assez compliqué car il faut tenir compte des gains
d'aériens des satellites et de leur orientation vers les utilisateurs (variable
par définition), du gain des antennes des récepteurs qui sont modestes en général,
à cause de leurs dimensions (3 dB estimés) et d'autres paramètres. À mon avis,
ce qu'il faut retenir est que la puissance minimum reçue au sol est de -160/-163
dBW pour L1 et ‑166 dBW pour L2 ceci pour un angle satellite/récepteur
de 5 degrés, on gagne environ deux dB pour le meilleur angle qui est voisin
de 40 degrés (et non de 90 degrés à cause des aériens satellites, cette valeur
étant justifiée plus loin). Notez que la réception GPS est de ce fait perturbée
par des obstacles, maisons, etc., et qu'en général le système ne fonctionne
pas dans une habitation, sauf aérien extérieur telle une antenne « patch » ou
une « quadri‑hélice » bien adaptée à cet usage si il n'y a pas de multitrajets
(échos) perturbateurs.
Une question en passant
: Si les antennes des satellites GPS sont faites pour arroser la Terre, comment
dans l’espace hors la portion comprise entre les orbites des GPS et la terre
peut‑on naviguer avec ce système ? Réponse : Il faut récupérer les signaux
satellites hors l'occultation de la terre, c'est‑à‑dire de part
et d'autre de celle ci, mais bien sûr le bilan de liaison est plus mauvais.
Les bases d'un récepteur GPS
Les récepteurs GPS sont
de petites merveilles d'électronique, et leur diffusion ainsi que l’intégration
à large échelle de leurs composants a permis cet état de choses.
L'organisation de base
d'un récepteur GPS, organisation susceptible d'évolution, car si les fonctions
existent toujours, l'évolution vers des circuits de plus en plus spécifiques
et à large intégration, comprime les blocs fonctionnels. Dans ces circuits on
trouve bien sûr du traitement numérique (DSP), mais aussi un bus 32 bits, un
cadencement à plusieurs mégahertz, et des mémoires passives et actives dont
un plan mémoire par satellite, en résumé un calculateur assez musclé souvent
en mode instructions réduites ou « risc ». Par exemple une société française
vient de sortir un ensemble de circuits réception GPS en seulement deux circuits
pour quelques centaines de francs…
La réception courante,
localisation non précise se contente du code C/A donc de la porteuse L1 et
de la reconstitution de l'horloge et des données. La réception pour une localisation
précise demande en plus de l'habilitation la réception des deux porteuses LI
et L2 pour des raison explicitées au paragraphe performances. La finalité de
la réception est de reconstituer l'horloge des satellites au sol, de mesurer
le temps d'arrivée du signal depuis chaque satellite ayant été préalablement
reconnu et associé à ses données ; puis à partir d'un traitement tenant compte
de toutes ces informations (actuellement douze satellites mémorisés) maximum
et en général 8 utilisés et de corrections diverses, calculer la position du
récepteur. Les codes C/A et P (codé) servent aux fonctions horloge et mesure
du temps d'arrivée, les données à l'identification des satellites, leurs éphémérides
et les diverses corrections. J'avoue qu'il ne m'a pas été possible de constituer
un schéma simple de l’ensemble des tâches assurées par un récepteur GPS trer
dans des considérations complexe donc retenir pour l’essentiel des fonctions :
Une antenne de réception en général réduite en dimensions pour faciliter son
utilisation en mobile par exemple, ce qui diminue ses performances. Pour compenser
ceci elle vent active avec un « gasfet» (faire attention il peut périr prés
d'un émetteur puissant) Un oscillateur local en tête de réception qui n'a pas
besoin d'être très précis, surtout avec les circuits récents. Il ne faut donc
pas le confondre avec une horloge, surtout qu’il est souvent synthétisé et possède
des sorties à d'autres fréquences.
2) La transformation
des signaux pseudo aléatoire en une moyenne fréquence numérique qui est traitée
par un procédé de traitement du même nom à raison d'un bloc mémoire par satellite
(les récepteurs actuels ont jusqu’à douze blocs donc douze satellites en mémoire).
3) La reconstitution
d'une horloge issue de chaque satellite par une boucle numérique pour avoir
dans un premier temps une séquence « réplique », mais décalée et « bruitée du
signal satellite. Cette fonction est réalisée par un NCO ou Numerical Controlled
Oscillateur qui se traduit par oscillateur à contrôle numérique qui à son tour
entre dans la boucle de décodage de chaque satellite mémorisé. C’est un asservissement
numérique fait à partir de tous les satellites, qui intègre chacun des temps
unitaires, certains satellites étant en retard, d'autre en phase et enfin certains
en avance, ceci à cause de l'effet Doppler et par rapport au temps « atomique
».
4) Ensuite les nouvelles
données obtenues mémorisées (répliques) à la place des précédentes sont de nouveau
traitées et décodées en valeurs I et Q selon les termes en usage (I égal en
phase et Q en quadrature), par des boucles digitales qui sont des boucles de
Costas et d'autres aides numériques, afin d'obtenir des signaux propres (comme
dans tout traitement numérique, il faut aussi tenir compte des «alias » ces
fausses informations issue de fréquences harmoniques qu'il faut filtrer) et
de mesurer le temps d'arrivée depuis chaque satellite. Bien sûr dans cette opération
on identifie chaque satellite, ses éphémérides et les données autres utiles
aux corrections, le traitement étant donc un traitement récurrent ayant pour
but d'obtenir la meilleure valeur possible en final.
Cette description sommaire
est valable dans le plan (longitude, latitude), mais doit être complétée pour
la troisième dimension (altitude) par un traitement supplémentaire qui vient
encore compliquer l'affaire.
Pour les curieux et passionnés
qui désirent aller plus loin vous trouverez dans des ouvrages spécialisés des
informations pour vous documenter, mais il faut savoir que souvent les algorithmes
des récepteurs sont propres aux constructeurs et que la documentation de ceux-ci
ne donne pas forcément toutes les informations sur les divers traitements.
4) Le calcul de la longitude,
latitude, altitude et éventuellement d'autres données telles le locator ou la
ville ou l’on se trouve etc. passe par la meilleure estimation faite au paragraphe
précédent du temps de propagation issu des satellites. Cette estimation est
issue de mesures, mais aussi de corrections importantes pour la précision. 5)
Enfin le calcul des vitesses et accélérations qui permettent d'accéder au DGPS
c'est-à-dire à une navigation et à ses paramètres liés.
Les performances,
les problèmes pour les atteindre et les utilisations possibles.
D'abord, pourquoi utiliser
plusieurs satellites ? Le minimum est de trois pour lever le doute. Dans la
réalité selon les cas deux satellites peuvent donner une precision correcte
ou dégradée appelées « DOP » ou « dilution de la précision » : selon leur positionnement
relatif  par
rapport à l'utilisateur. On voit que la multiplication du nombre de satellites
réduit cette dégradation de précision d'où les douze satellites utilisés actuellement
dans la plupart des récepteurs.
par
rapport à l'utilisateur. On voit que la multiplication du nombre de satellites
réduit cette dégradation de précision d'où les douze satellites utilisés actuellement
dans la plupart des récepteurs.
Le problème est le même
pour le positionnement vertical où la meilleure solution est d'avoir un satellite
au zénith c'est-à-dire à la verticale du lieu de réception, les autres étant
de part et d'autre et au-dessus de l'horizon, ce qui amène presque obligatoirement
au problème de « dilution de la précision » donc à des valeurs moins bonnes
en vertical que dans le plan de la surface terrestre (voilà pourquoi l’altitude
est moins précise).
On peut, donc aussi,
de ce fait, « intuiter » que la meilleure configuration de positionnement des
satellites pour les meilleures performances de positionnement trois axes est
au voisinage des 40/45 degrés d'où positionnement des antennes des satellites
pour avantager cet angle de réception.
Voici quelques valeurs
données par les spécifications officielles système, en mode ouvert à tous précision
au sol horizontale 100 mètres 95 % du temps, en mode codé : 22 mètres toujours
95 % du temps, en vertical mêmes conditions 150 mètres et 27,7 mètres.
La précision sur le temps
est de ± 340 nanosecondes en mode SA et ± 200 nanosecondes en mode codé. Ces
valeurs en position sont meilleures que cela en utilisation courante avec la
réception de douze satellites et l'on peut obtenir une trentaine de mètres environ
dans le référentiel WGS-84 cité, (attention : avec ce niveau de précision le
mode de projection, c'est-à-dire le passage de la sphère au plan de la carte,
n'est pas indifférent!) ; même mieux avec des récepteurs de plus en plus sophistiqués
et coûteux tels ceux qui reçoivent et GPS et GLONASS en même temps et déjouent
partiellement le codage (qui est donc en place pour dégrader donc la précision),
ou encore en ajoutant INMARSAT.
Il faut cependant savoir
que la précision n'est pas la même en tous les lieux de la terre, (d'où le découpage
en zones) et que les erreurs viennent :
• Des horloges embarquées.
• Des perturbations extérieures
aux satellites et aux prédictions des positions des satellites. Des erreurs
apportées par les tuyères de recalage.
* Des délais de propagation
ionosphérique et troposphérique.
* Des bruits du récepteur
et de celui dû aux multiples émissions sur la même fréquence (code de gestion
Gold).
• Des multitrajets (échos
engendrés par la réception).
• D'autres du second
ordre que je ne cite pas. Toutes ces erreurs sont analysées en dérivées partielles,
mais comme on peut le penser la principale cause d'erreur en accès libre est
le brouillage qui contribue à environ 97 % de l'erreur de positionnement.
La réduction de ces erreurs
en mode codé est réalisée par différentes solutions, la première étant l'élimination
du brouillage qui cause des erreurs fluctuantes de positionnement en périodes
de l'ordre de 400/800 secondes par exemple; la seconde la réception du code
sur les porteuses L1 et L2 ce qui permet d'éliminer en grande partie les erreurs
de propagations; la troisième la réception et l'utilisation des données qui
permettent de minimiser les erreurs horloge et les éphémérides satellites, et
enfin l'utilisation de filtrages et estimateurs plus sophistiqués, mais demandant
plus de puissance de traitement.
Les autres utilisations
du GPS sont nombreuses et je ne peux les citer toutes, en voici quelques-unes
:
- Le DGPS ou différentiel
GPS qui permet de faire de la navigation sur terre ou ailleurs comme sur un
satellite par exemple. Dans les utilisations professionnelles on ajoute des
gyroscopes et des accéléromètres, le tout filtré par un filtre de Kalman qui
est un estimateur récurrent et permet d'arriver à des précisions étonnantes
de quelques centimètre-seconde, l'avenir étant d'arriver à 0,1 centimètre-seconde !
Des mesures de vitesse à bord de mobiles sont chose courante.
La navigation aéronautique
ne peut se contenter de la précision verticale donnée précédemment, aussi on
ajoute une balise au sol qui donne une position connue, qui est incluse dans
le logiciel du système de navigation de l'aéronef et permet ainsi d'arriver
à une précision verticale de l'ordre de 10 à 20 centimètres. La localisation
à bord de mobiles permet de se situer sur une carte dans une ville par exemple,
dans ce cas la carte est numérisée (le mobile est donc « forcé » sur la route
compte tenu des erreurs de positionnement possible et de la largeur d'une route
!) et le système de navigation est assisté de mesures de distance tels des odomètres
par exemple couplés aux roues du véhicule.
La sortie sur visualisation
soit en numérique, soit en écran graphique ne pose pas de problèmes, mais sachez
qu'il existe plusieurs méthodes de sortie des informations des cartes GPS dont
certaines en RS232 directement acceptable sur PC mais attention aux normes qui
sont NMEA (National Marine Electronics Association) en général pour les professionnels
et RTCM (Radio Technical Commission of Maritimes Services). Bien sûr ces normes
sont différentes…
Enfin la récupération
du temps au sol par l'intermédiaire d'une carte GPS. Par exemple le GPS25 donne
une horloge reconstituée au sol à ± une microseconde mais qui sur des temps
longs permet de récupérer mieux que le 10 moins 10, d'autre cartes GPS sont
plus précises surtout en fonction du traitement.
D'autres systèmes apparaissent
dans le commerce au niveau professionnel et certains sont basés non plus sur
une carte GPS mais sur la récupération de la porteuse qui a la même précision
que l'horloge des satellites, mais qu'il faut corriger du Doppler par des méthodes
voisines de celles utilisées dans les cartes GPS. Le calage de l'horloge récupérée
au sol à partir des informations sorties RS232 ne me semble pas la bonne solution
si l'on désire une précision «atomique» car j'ai identifié de nombreuses cause
d'erreur aléatoires ou mal maîtrisées capables d'apporter des perturbations
supplémentaires par rapport au « jitter » propre du codage GPS qui lui est nul
en valeur moyenne à terme.
Conclusions
Le GPS est donc un système
plein d'avenir et qui se développe dans bien des domaines y compris les plus
inattendus de façon extraordinaire.
Bibliographie
GPS in 10 years Microwawe
journal, février 1998.
Introduction aux éphémérides
astronomiques, éditions EDR
Gold
R « Optimal Binary Séquence fors Spectrum Multiplexing », IEEE octobre
Le livre de référence
si vous n'avez pa3 des mathématiques « Understanding ( Principles and applications
D Kaplan éditions Artech House très complet.
Time
clocks and GPSIGPS word mag nov déc 1991.
GPS
and time transfert IEEE juillet 1991
Retour
menu météo.